三维(3D)打印作为一种新兴的增材制造技术,促进了多功能且复杂结构原型的制造,在航空航天、组织工程、珠宝和柔性电子等学科领域展现了巨大的前景。目前,由磁性粒子和可打印聚合物组成的3D打印磁性结构,因在可控机械手、可变形软体机器人等方面拥有巨大潜力,引起了人们的广泛关注。
中国工程院院刊《Engineering》2022年第8期刊发华中科技大学苏彬教授研究团队的《可自供能感知液滴撞击的3D打印超疏水磁性器件》一文。文章通过利用3D打印方法制造具有超疏水表面的柔性磁性器件,用于自供能感知下落的水滴,从而实现由水滴驱动的力电转换。文章指出,磁性顶部的超疏水特性有效减少了水滴的固/液黏附,保证了器件具有良好的回弹性;结合麦克斯韦数值仿真,确定了包括制造和测试参数在内的可控因素,以研究它们对力电转换性能的影响;最后,将三个3D打印磁性器件串联起来,通过收集的雨水流触发红色发光二极管进行照明。本文研究为制造力电转换器件实现自供能感知系统提供了新的途径。
![]() 引言
引言
三维(3D)打印作为一种新兴的增材制造技术,促进了多功能且复杂结构原型的制造,在航空航天、组织工程、珠宝和柔性电子等学科领域展现了巨大的前景。目前,由磁性粒子和可打印聚合物组成的3D打印磁性结构,因在可控机械手、可变形软体机器人等方面拥有巨大潜力,引起了人们的广泛关注。Ji等报道了一种软夹钳型磁性致动器工艺,使用两种材料通过一步法[数字光处理(DLP)]实现3D打印,并且可以在外部磁致动下进行变形、物体捕获、运输和释放。随后,Kim等和Qi等分别通过直接墨水书写(DIW)打印和熔融沉积建模(FDM)打印开发了程序化铁磁畴。通过在聚合物基质的凝固过程中施加磁场,为磁活性软材料产生各向异性的磁化强度曲线。与基于液体的3D打印方法相比,选择性激光烧结(SLS)打印通常用于制备磁性驱动夹具,以便通过磁刺激进行可控形变。
除了制备由外部磁场驱动的机械手和软体机器人外,磁性软结构在受到外力产生形变时,其磁场分布也随之改变,表明该结构具有将机械能转化为电能的能力。最近,本文研究团队报道了一种通过柔性磁电系统使用水滴发电的工作,然而由于设置的几个组件需要先模制后组装,因此制造过程烦琐且耗时。3D打印方法被认为有助于磁能收集器的制造。此外,3D打印过程使得基于数字设计和制造的磁性结构易于调整。在这种情况下,可以生成多种磁性架构,从而优化设计以实现最大电流输出。
在本文中,利用3D打印方法制造具有超疏水表面的柔性磁性器件,从而实现由水滴驱动的力电转换。通过两种集成的3D打印工艺制造的柔性力电转换装置,由磁性顶部和弹性杆状底部组成。当遭受水滴落下带来的机械冲击时,这种3D打印磁性器件(3DMD)会通过其内部的导电线圈产生磁通量变化,从而产生电能。值得注意的是,磁性顶部的超疏水特性有效减少了水滴的固/液黏附,保证了器件具有良好的回弹性。此外,结合麦克斯韦数值仿真,确定了包括制造和测试参数在内的可控因素,以研究它们对力电转换性能的影响。最后,将三个3DMD串联起来,通过收集的雨水流触发红色发光二极管(LED)进行照明。本研究为制造力电转换器件以实现自供能感知系统提供了新的途径。
![]() 材料和方法
材料和方法
(一)材料
Nd2Fe14B颗粒(400目;广州新诺德传动部件有限公司)、热塑性聚氨酯(TPU)粉末(LUVOSINT TPU X92A-2 WT;德国LEHVOSS集团)、疏水二氧化硅(AEROSIL R202;德国Evonik Degussa公司)、乙醇(AR, ≥ 99.7%;上海阿拉丁生化科技股份有限公司)和光聚合物(Agilus30;美国Stratasys公司)。材料均按照购买时的原样使用。购买并定制了环形铜线圈,参数如下:线径0.1 mm、内径3.2 mm、外径25 mm、厚度1.5 mm。
(二)3D打印磁性器件的制造
首先将Nd2Fe14B磁粉进行球磨处理,并按照不同的质量分数(20%、30%和40%)与TPU粉末均匀混合。充分混合后,将粉末状复合材料倒入挤出成型系统(Wellzoom B,深圳市米斯达科技有限公司)中。该系统包括单螺杆挤出机和螺纹辊,用于制备3D打印的柔性Nd2Fe14B-TPU复合长丝。为了确保所需长丝的有效挤出,基于不同的质量分数,将Nd2Fe14B-TPU复合材料的挤出温度设置为140~160 °C。值得注意的是,温度超过160 °C时可能导致复合材料降解甚至碳化,并且还需要注意流动性和工艺稳定性的问题。同时,使用线辊收集Nd2Fe14B-TPU复合长丝。然后,将收集的长丝直接送入FDM 3D打印机,无需二次混合即可制造磁性顶部。
本文中的3DMD结构是通过商业3ds Max软件设计的。采用FDM 3D打印技术,制造了不同厚度(1~3 mm)和凸起尺寸(半径为1.0 mm或1.5 mm)的多个磁性顶部。顶部的磁性颗粒通过磁化器(中国香港久巨工業設備有限公司)在1900 V以上的高压下产生的脉冲磁场进行垂直磁化。10%(质量分数)疏水性二氧化硅纳米颗粒经过超声处理后分散在乙醇中,然后将二氧化硅基溶液喷洒到3D打印的磁性顶部进行疏水处理。Agilus30光聚合物用于通过Polyjet 3D打印技术制造弹性杆,弹性杆长度为2~8 mm。最后通过简单组装三个组件,即磁性顶部、弹性杆状底部和导电铜线圈来完成3DMD的制造。
(三)表征与测试
通过原位X射线微计算机断层扫描(micro-CT)技术(Xradia 510 Versa,德国Zeiss集团)观察Nd2Fe14B颗粒在磁性复合长丝(简称磁丝)中的分散情况。通过场发射扫描电子显微镜(FESEM)(Sirion 200,美国FEI公司)观察Nd2Fe14B颗粒的形态以及经二氧化硅处理/未处理的磁性顶部表面。通过超深度3D显微镜(DSX510,日Olympus公司)观察磁性顶部的凸起大小。3D打印的顶部磁感应强度分布由多维磁场测试系统(F-30,北京翠海佳诚磁电科技有限责任公司)确定。通过接触角测量仪(SDC-350,东莞市晟鼎精密仪器有限公司)测量二氧化硅处理/未处理样品在静态模式下的水接触角。通过高速摄像系统(ST-857,日本NAC Image Technology股份有限公司)实时记录水滴滴落时的样品状态。同时,通过电化学工作站(Autolab PGSTAT204,瑞士Metrohm公司)研究了由振动引起的机械变形相关的力电转换性能。
(四)数值仿真
使用ANSYS Maxwell分析软件计算不同磁性器件的3D磁场强度分布。磁化方向取z轴正方向。根据以前的研究工作,使用了一个等效一元模型。在本文中,将Nd2Fe14B-TPU磁顶的型号设置为同比例的磁铁。在简化等效模型中,矫顽力(Hc)为-151197.2 A·m-1,剩磁(Br)为0.19 T。
![]() 实验结果
实验结果
本文构建了一个由磁性顶部和弹性底部组成的3DMD,该器件分别由FDM和 Polyjet 3D打印技术生成(图1)。通常,Nd2Fe14B被认为是最强的永磁材料,因为它具有较高的最大能积。TPU作为低杨氏模量的热塑性聚合物,更适合在FDM打印时构建柔性结构(见附录A中的图S1)。因此,平均晶粒尺寸为18.95 μm的Nd2Fe14B粉末(见附录A中的图S2)与TPU粉末以4∶6的质量比[图1(a)]均匀混合,通过挤压成型系统(见附录A中的图S3)产生具有优异柔韧性的磁丝[图1(b)、(f)、(g)]。
图1(e)和附录A中的图S4显示了通过原位X射线微计算机断层扫描技术获得的复合长丝内Nd2Fe14B磁性颗粒的均匀分散状态(亮区)。单根磁丝直径约为1.72 mm,有利于FDM 3D打印设备的应用[见图1(c)和附录A中的图S3(c)]。因此,在将一层薄薄的疏水二氧化硅气相纳米颗粒沉积到磁性顶部后,打印出30 mm(直径)× 3 mm(厚度)的磁性和超疏水顶部[图1(d)、(h)]。
然后,使用Polyjet 3D打印技术制造30 mm(直径)× 6 mm(长度)的弹性杆状底部[图 1(i)、(k)]。与FDM技术相比,Polyjet 3D打印方法可以制造具有低杨氏模量的弹性聚合物,为在施加外力下的可逆变形提供柔性支撑。最后,通过商业黏合剂将磁性顶部和柔性杆状底部粘合在一起,在底部空间插入线圈后产生3DMD [见图1(l)和附录A中的图S5]。
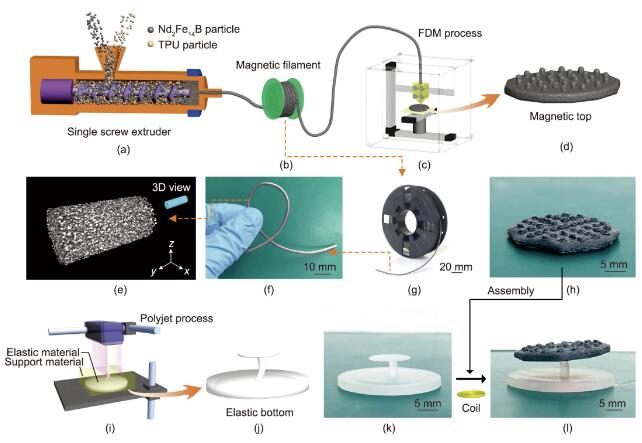 图1. 仿生3DMD的制造。(a)~(d)通过FDM技术制造磁性顶部的示意图;(e)~(g)复合磁丝的表征:(e)通过微CT技术获得的3D图像,(f)单个柔性磁丝的光学照片,(g)准备好的卷轴磁丝;(h)基于Nd2Fe14B和TPU复合粉末的打印磁性顶部;(i)、(j)通过Polyjet技术制造弹性部件的示意图;(k)弹性杆状底部的光学照片;(l)由磁性顶部、导电线圈和弹性杆状底部组装而成的3DMD。
图1. 仿生3DMD的制造。(a)~(d)通过FDM技术制造磁性顶部的示意图;(e)~(g)复合磁丝的表征:(e)通过微CT技术获得的3D图像,(f)单个柔性磁丝的光学照片,(g)准备好的卷轴磁丝;(h)基于Nd2Fe14B和TPU复合粉末的打印磁性顶部;(i)、(j)通过Polyjet技术制造弹性部件的示意图;(k)弹性杆状底部的光学照片;(l)由磁性顶部、导电线圈和弹性杆状底部组装而成的3DMD。
对3D打印磁性顶部的外观和特性进行细致的研究(图2)。根据图2(a)中的光学图像,凸起状结构被打印在顶面上。由于存在一层薄薄的疏水二氧化硅纳米颗粒,磁性顶部略带白色。图2(b)表征了磁性顶部乳头阵列的准半球形形态。通过超深度3D显微镜测量大约0.92 mm的凸起高度[图2(e)]。根据放大的FESEM图像显示[图2(c)],许多二氧化硅纳米颗粒聚集在一起。疏水性二氧化硅纳米颗粒的低表面能与毫米/纳米级粗糙度相结合,使打印的顶部显示超疏水状态[图2(f)]。
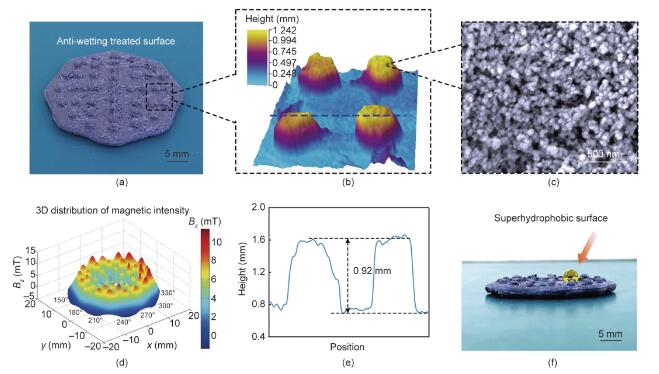 图2. FDM技术打印的超疏水磁性顶部的表征。(a)超疏水磁性顶部的光学照片;(b)表面凸起的超深度3D显微镜图像;(c)处理的磁性顶部表面上疏水二氧化硅纳米颗粒的FESEM图像;(d)二氧化硅处理过的磁性顶部的磁感应强度的3D分布,Bz表示z轴的磁感应强度;(e)超深度3D显微镜测量的凸起高度;(f)光学照片显示磁性顶部对黄色水滴的超疏水性。
图2. FDM技术打印的超疏水磁性顶部的表征。(a)超疏水磁性顶部的光学照片;(b)表面凸起的超深度3D显微镜图像;(c)处理的磁性顶部表面上疏水二氧化硅纳米颗粒的FESEM图像;(d)二氧化硅处理过的磁性顶部的磁感应强度的3D分布,Bz表示z轴的磁感应强度;(e)超深度3D显微镜测量的凸起高度;(f)光学照片显示磁性顶部对黄色水滴的超疏水性。
除了超疏水特性外,还研究了打印顶部的磁性。经过磁化处理后,测量了打印磁性顶部的磁感应强度的3D分布[图2(d)]。显然,最强的磁力出现在凸起的顶部。平均表面磁感应强度约为9 mT。
如图3所示,对3DMD的力电转换进行研究。打印顶部的厚度、磁粉含量和弹性杆的高度分别为2 mm、40%(质量分数)和6 mm。将水滴(55 μL)滴到3DMD表面,滴落高度为40 cm。由于杆状底部由低杨氏模量弹性聚合物制成,弹性杆可以灵活弯曲并弹性恢复,以实现磁性顶部和底部线圈之间的距离变化。在这种情况下,通过线圈的磁通量发生了变化,导致从落下的水滴中发电[图3(a)]。
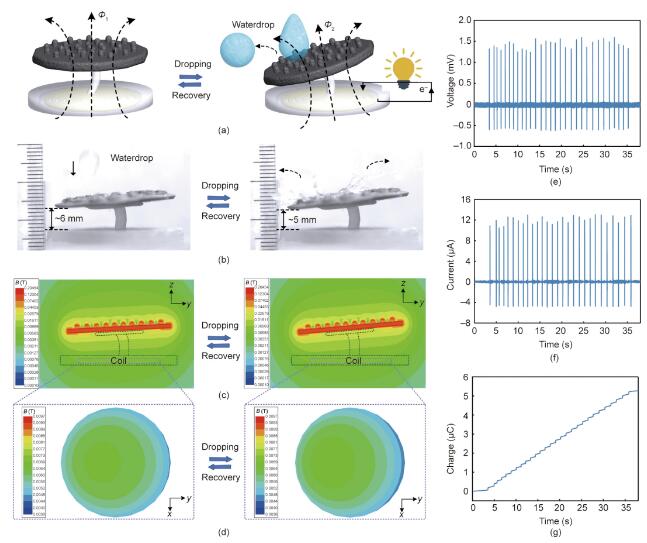 图3. 3DMD具有自供能感知以感应下落水滴的能力。(a)3DMD在滴水过程中的力电转换能力示意图。(b)由高速相机系统捕捉到的因水滴滴落导致变形之前(左)和之后(右)的3DMD光学图像。通过3D仿真计算得到的图(c)和(d)分别是3DMD的磁感应强度分布的2D视图和滴水前后线圈经过一圈的磁感应强度。(c)黑色和紫色虚线分别表示弹性元件和线圈的位置。相应的电学性能:(e)电压输出;(f)电流输出;(g)转移电荷与时间曲线。在这种情况下,水滴(每个液滴体积为55 μL)在40 cm的高度释放,并滴落在3DMD的表面上。顶部的磁粉含量为40%,厚度为2 mm。Φ1、Φ2:分别表示水滴冲击前后通过底部线圈的磁通量;B:磁感应强度。
图3. 3DMD具有自供能感知以感应下落水滴的能力。(a)3DMD在滴水过程中的力电转换能力示意图。(b)由高速相机系统捕捉到的因水滴滴落导致变形之前(左)和之后(右)的3DMD光学图像。通过3D仿真计算得到的图(c)和(d)分别是3DMD的磁感应强度分布的2D视图和滴水前后线圈经过一圈的磁感应强度。(c)黑色和紫色虚线分别表示弹性元件和线圈的位置。相应的电学性能:(e)电压输出;(f)电流输出;(g)转移电荷与时间曲线。在这种情况下,水滴(每个液滴体积为55 μL)在40 cm的高度释放,并滴落在3DMD的表面上。顶部的磁粉含量为40%,厚度为2 mm。Φ1、Φ2:分别表示水滴冲击前后通过底部线圈的磁通量;B:磁感应强度。
由高速摄像机记录的快照[图3(b)]显示了相应的变形过程。研究发现,磁性顶部和底部线圈之间的距离变化约为1 mm,从而允许通过线圈的磁通量发生变化。当一系列水滴在相同参数下滴下时,在图3(e)、(f)中分别记录了随时间变化的相应电压和电流输出,并且可以找到有规则的向上-向下响应峰值。其中第一个电压和电流峰值的平均输出分别达到1.6 mV和12.9 μA。在变形/恢复过程中转移的相应电荷为5.2 μC [图3(g)]。在先前的研究中,3D打印触觉传感器必须由外部电源供电,随后研究人员才提出了使用压电或摩擦电材料的自供能概念来收集水滴或微小振动的机械能。与现有文献相比,由于电磁工作机制,3DMD的输出电流高于已发表的纪录(表1)。在这种情况下,3DMD可以将水滴的重力势能转化为电能,显示出自供能感知能力。
表1 不同柔性触觉传感器的对比
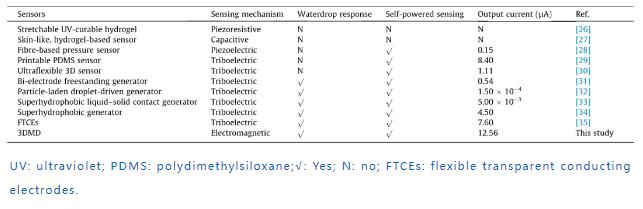 UV: ultraviolet; PDMS: polydimethylsiloxane;√: Yes; N: no; FTCEs: flexible transparent conducting electrodes.
UV: ultraviolet; PDMS: polydimethylsiloxane;√: Yes; N: no; FTCEs: flexible transparent conducting electrodes.
对变形前后的3DMD进行麦克斯韦数值仿真,以研究力电转换机制。采用3D静磁解算器对磁性顶部进行3D仿真建模,以计算变形前后的磁场分布[图3(c)]。在这种情况下,使用等效一元模型来简化复杂的二元磁粉/聚合物系统。图3(d)显示了由水滴驱动的3DMD变形之前/之后通过一圈线圈的磁通量,其中颜色梯度(由蓝色到红色)表示磁场逐渐增加。磁通量变化见附录A中的表S1(详细计算过程见附录A中的注释S1)。因此,释放的水滴的重力势能可以转化为3DMD的形变,通过在3DMD中产生增加的磁通量而发电。
为了验证超疏水特性的重要性,制备了一个未经处理的3DMD作为对照样品,其中除了超疏水表面之外,其余组分保持不变。这两个样品的表面分别如附录A中的图S6(a)、(b)所示。由于二氧化硅处理后的表面能较低,并且处理后表面的静态水接触角约为151°,而未经处理的表面仅为62° [见附录A中的图S6(c)、(d)]。图4显示了超疏水和亲水3DMD在水滴连续滴落时的电学性能。当大量水滴从相同高度连续滴落到这两个系统上时,由于抗润湿的特性,水滴很少停留在超疏水系统的表面[图4(a)、(b)],而在亲水系统上,附着几个润湿点[图4(d)、(e)]。经过一段时间的滴水后,超疏水系统可以恢复到最初的状态。然而,大量的水残留在亲水系统上,导致磁性顶部黏附在底部。图4(c)、(f)显示了这两个样品在50个水滴连续滴落时的力电转换性能。超疏水3DMD具有稳定的电流响应,但亲水3DMD的输出性能随着时间变化明显衰减。
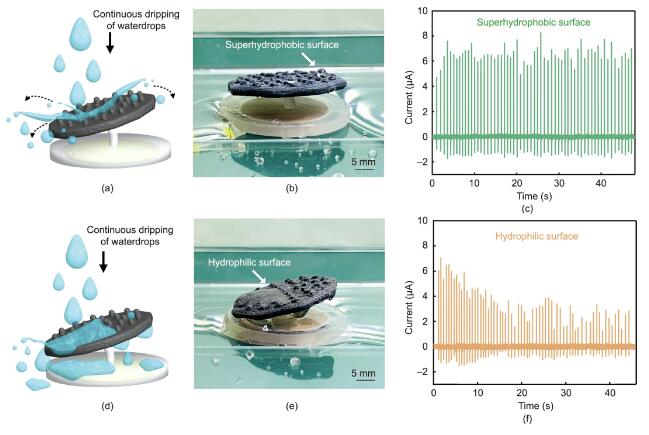 图4. 超疏水和亲水3DMD在水滴连续滴落下的电学性能。超疏水(a)和亲水(d)3DMD的水滴连续滴落示意图。(b)和(e)表示分别在50个连续滴水循环后的超疏水和亲水样品的光学照片;(c)和(f)表示随着时间变化的相应电流响应情况。
图4. 超疏水和亲水3DMD在水滴连续滴落下的电学性能。超疏水(a)和亲水(d)3DMD的水滴连续滴落示意图。(b)和(e)表示分别在50个连续滴水循环后的超疏水和亲水样品的光学照片;(c)和(f)表示随着时间变化的相应电流响应情况。
由于磁通量的变化,理论上3DMD的力电转换性能可以根据法拉第感应定律计算如下:

式中,E是输出电压;n是线圈的匝数;ΔФi是通过每个等效线圈环的磁通量变化;Δt是3DMD在变形下的响应时间;ΔBi是每个等效线圈的磁感应强度变化等效环;Si是每个等效线圈环的面积。
结合公式(1)研究了各种制造参数对3DMD电学性能的贡献,包括Nd2Fe14B颗粒的含量、凸起尺寸,以及磁性顶部的厚度。为了进一步研究,只调整了一个可变参数,而其他制造和测试参数保持不变。Nd2Fe14B含量从20%增加到40%,导致磁性顶部的表面磁感应强度(B)增强,从而显著提高3DMD的电流输出(见附录A中的图S7)。虽然更多的磁性填料(质量分数大于40%)可以产生更高的磁感应强度,但是更容易引起FDM打印机的堵塞。权衡打印过程中分辨率和流畅性的问题,最终磁粉含量保持在40%。如附录A中的图S8所示,磁顶上的凸起大小对磁感应强度或力电转换性能并无显著影响。此外,制造了不同厚度(1 mm、2 mm和3 mm)的磁性顶部以调整磁感应强度(见附录A中的图S9)。由3D仿真计算证实,磁感应强度随着磁性顶部厚度的增加而增加[见附录A中的图S9(a)~(c)]。尽管如此,磁感应强度目前有明显的下降趋势[见附录A中的图S9(e)]。当水滴落到3DMD表面时,同一弹性杆的微小形变被高速摄像系统捕获[见附录 A中的图S9(d)、(f)]。考虑到磁性顶部的质量,较薄的顶部意味着柔性更强,使弹性杆更容易变形。附录A中的表S2证实了该事实,显示出通过数值仿真计算出的磁通量随着磁性顶部厚度的增加而减少。
此外,本研究探讨了弹性杆状底部的弹性杆长度,该长度在调整磁性顶部和底部线圈之间的间隙中起到关键作用。其他规格保持不变:将磁性顶部设置为具有相同的2 mm厚度和40%的磁粉含量。如图5(a)~(c)所示,4种3DMD显示出在0.2~0.8 cm范围内的不同弹性杆长度。在相同的测试参数下,当水滴滴落在这些3DMD上时,捕捉3DMD在形变前后的状态如图5(d)~(f)所示。结合图3(b)中的快照,弹性杆长度的增加可以略微提高3DMD的柔性,但其输出性能并无逐渐增强的趋势[图5(j)、(k)]。通过将茎长度从0.6 cm变为0.8 cm,可发现电流输出下降,原因是初始阶段通过3DMD内的一圈线圈的磁感应强度降低,以及磁通量的变化相应减少[图3(d)、图5(i)和表2]。因此,在这种情况下,0.6 cm的弹性杆长度被认为是具有良好力电转换性能的最佳选择。
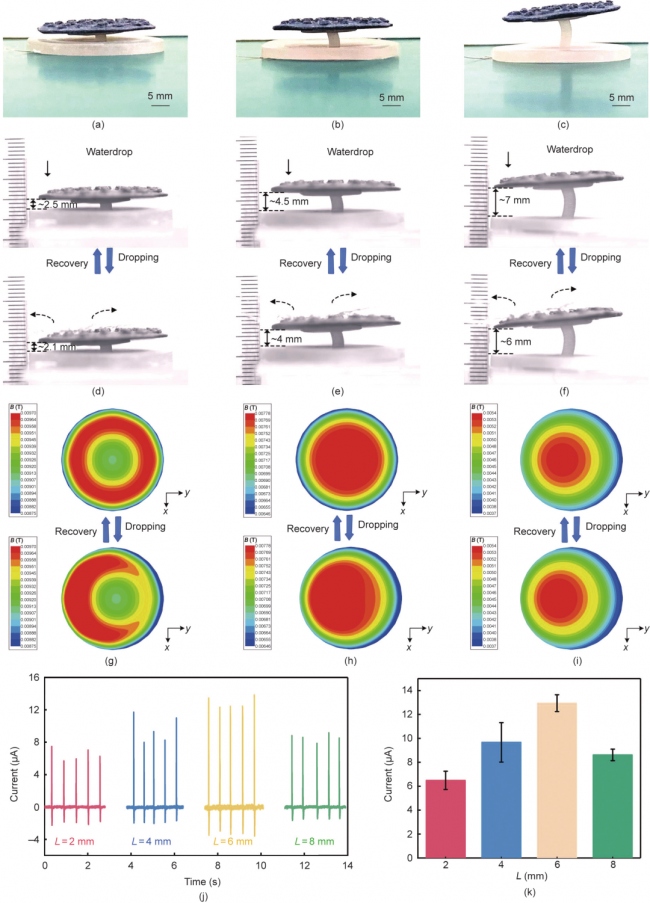 图5. 弹性底部的弹性杆长度对3DMD力电转换性能的影响。三种3DMD [分别带有0.2 cm(a)、0.4 cm(b)、0.8 cm(c)长弹性杆]的光学照片,三种3DMD的磁性顶部相同,磁负载为40%(质量分数),厚度为2 mm。(d)、(e)和(f)为相机系统记录的三个3DMD因水滴滴落而产生形变前后的快照,水滴体积为55 μL,从相同的40 cm高度滴落。(g)、(h)和(i)为水滴滴落之前/之后通过线圈同一个圈的相应3D仿真磁感应强度分布(xy平面)。(j)具有4种长度(L)弹性杆的不同3DMD的电流输出,它们的对比直方图如(k)所示。
图5. 弹性底部的弹性杆长度对3DMD力电转换性能的影响。三种3DMD [分别带有0.2 cm(a)、0.4 cm(b)、0.8 cm(c)长弹性杆]的光学照片,三种3DMD的磁性顶部相同,磁负载为40%(质量分数),厚度为2 mm。(d)、(e)和(f)为相机系统记录的三个3DMD因水滴滴落而产生形变前后的快照,水滴体积为55 μL,从相同的40 cm高度滴落。(g)、(h)和(i)为水滴滴落之前/之后通过线圈同一个圈的相应3D仿真磁感应强度分布(xy平面)。(j)具有4种长度(L)弹性杆的不同3DMD的电流输出,它们的对比直方图如(k)所示。
表2 滴水前后在弹性元件不同弹性杆长度的4种不同的3DMD内,计算一圈线圈的磁通量

ΔФ = Ф2 – Ф1, where Ф1 and Ф2 represent the magnetic flux before and after dripping, respectively. The components of these four 3DMDs are the same except for the elastic stem-like support, and the chosen circles of the conductive coil for the simulated calculation have identical sizes.
进一步研究3DMD的力电转换能力。即使在水滴持续滴落超过250 s后,超疏水3DMD的力电转换仍然存在,并显示出长期稳定性[图6(a)、(b)]。此外,制成的3DMD在大气中停留28 d后仍然保持相当的可靠性[见附录A中的图S10]。其中几个测试参数,如水滴体积、滴水高度和水滴下落速度,在3DMD的力电转换性能中起着重要作用。增加的水滴体积或滴落高度会产生更大的重力势能,从而导致磁性元件和电气件之间更大的形变,以增强力电转换能力。通过将液滴体积从26 μL增加到55 μL,电流峰值呈现近乎线性增长,如图6(c)、(d)所示。同样,当将水滴的释放高度提高到40 cm时,电流响应显著提高(见附录A中的图S11)。图6(e)、(f)描述了输出电流值和水滴下落速度的相关性。虽然随着水滴下落速度的增加输出电流呈上升趋势,但增长幅度很小;在水滴下落速度变化超过120 μL·s-1时,输出电流仅增加了2 μA。
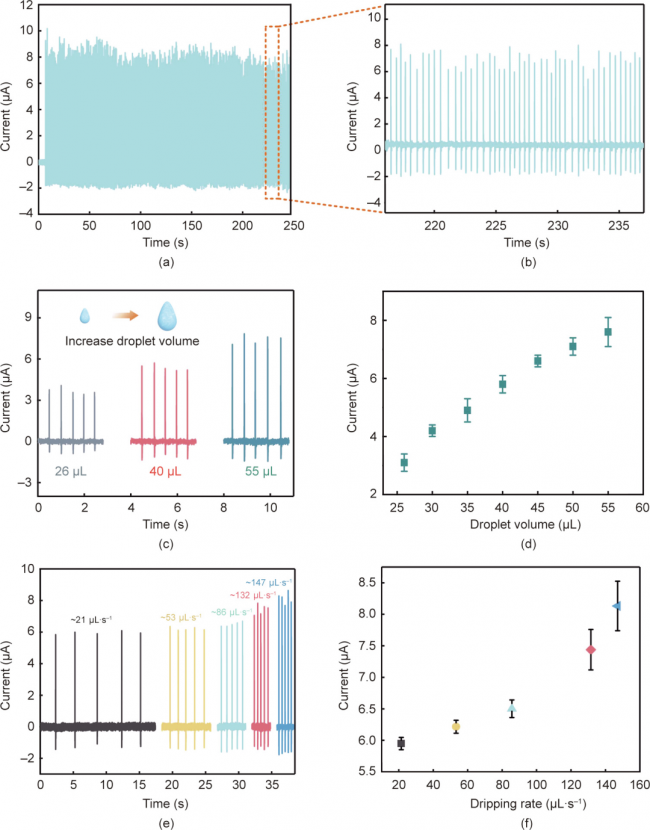 图6. 不同滴水参数对3DMD力电转换性能的影响。(a)连续滴水250 s试验;(b)(a)的放大图,3DMD受到水滴从40 cm的高度连续滴落;(c)从相同高度滴到3DMD上的不同体积水滴的输出电流值;(e)使用不同水滴下落速度时3DMD的输出电流值;(d)、(f)分别对(c)和(e)的输出电流值峰值进行统计分析。
图6. 不同滴水参数对3DMD力电转换性能的影响。(a)连续滴水250 s试验;(b)(a)的放大图,3DMD受到水滴从40 cm的高度连续滴落;(c)从相同高度滴到3DMD上的不同体积水滴的输出电流值;(e)使用不同水滴下落速度时3DMD的输出电流值;(d)、(f)分别对(c)和(e)的输出电流值峰值进行统计分析。
考虑在雨天的实际应用,3DMD采集器可以通过使用从屋顶收集的雨水流来点亮商业LED [图7(a)]。通过将三个3DMD串联形成串联装置。如图 7(d)所示,串联装置连接到由放大器和整流器单元以及LED组成的电路系统上。当仿真雨天环境的雨水流从40 cm的高度滴落到整个器件上时,可以成功触发商业红色LED实现照明[见图7(b)和附录A中的视频S1],表明这种串联装置可以将雨水流的机械能转换为电能。此外,可以将由3DMD驱动的LED用作远程环境中池塘/湖泊的警告标志,以提醒附近的人避免在下雨天滑倒。图7(c)记录了设置在16 s内的电流响应。在此过程中相应的累积电荷几乎达到40 μC [图7(d)]。
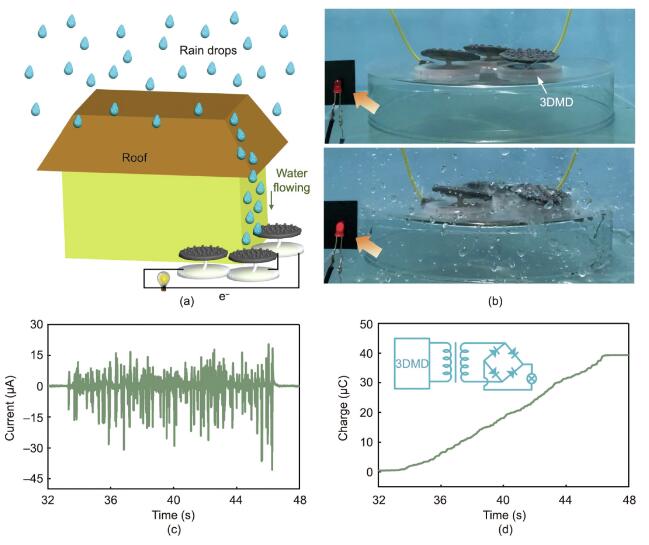 图7. 基于磁性荷叶簇的整个串联装置的力电转换演示。(a)串联装置示意图,将三个3DMD串联,由雨天从屋顶流下的雨滴驱动;(b)串联装置的光学照片,当雨水流落到地表时触发商业红色LED;(c)雨水流动时器件的电流响应;(d)根据(c)中的电流-时间曲线转移电荷。插图显示了一个预先设计的电路图,其中包含一个升压器和一个整流器。
图7. 基于磁性荷叶簇的整个串联装置的力电转换演示。(a)串联装置示意图,将三个3DMD串联,由雨天从屋顶流下的雨滴驱动;(b)串联装置的光学照片,当雨水流落到地表时触发商业红色LED;(c)雨水流动时器件的电流响应;(d)根据(c)中的电流-时间曲线转移电荷。插图显示了一个预先设计的电路图,其中包含一个升压器和一个整流器。
![]() 结论
结论
本文通过采用3D打印制造了一个柔性的超疏水和磁性系统,用于自供能感知下落的水滴。3DMD的两个部分,即磁性顶部和弹性杆底部分别通过FDM和Polyjet技术制备。由于具有超疏水表面,3DMD在连续滴水的情况下表现出长期稳定的力电转换能力。这主要归因于有效降低的固/液黏附性,确保了磁性和电气元件之间可靠的距离变化,进而实现发电。本研究为雨滴的灵活力电转换策略提供了一种新方法,并且可推广到未来的振动监测中。
注:本文内容呈现略有调整,若需可查看原文。
改编原文:
Xuan Zhang, Qi Wang, Ruiping Zou, Bo Song, Chunze Yan, Yusheng Shi, Bin Su.3D-Printed Superhydrophobic and Magnetic Device That Can Self-Powered Sense A Tiny Droplet Impact [J].Engineering,2022,15(8):197-206.
本文选自中国工程院院刊《Engineering》2022年第8期
作者:张璇, 王琦, 邹瑞萍, 宋波, 闫春泽, 史玉升, 苏彬
来源:3D-Printed Superhydrophobic and Magnetic Device That Can Self-Powered Sense A Tiny Droplet Impact[J].Engineering,2022,15(8):197-206.
l 谷专栏 l
欢迎高校及科研机构、企业科学家加入谷专栏,与业界分享对推动增材制造发展起关键作用的共性基础科研与应用成果,欢迎扫描下方图片二维码提交您的信息。
白皮书下载 l 加入3D科学谷QQ群:106477771
网站投稿 l 发送至2509957133@qq.com
欢迎转载 l 转载请注明来源3D科学谷 l 链接到3D科学谷网站原文