电弧熔丝增材制造(Arc based directed energy deposition, DED-Arc)是一种高效快速近净成形制造技术,因其低成本、高柔性的显著优势,成为中/大型金属零件制造的热点研究方向,其广泛应用于航空航天、武器装备、船舶重工等核心高端装备制造领域。在整个增材制造过程中,从三维模型到打印数据的工艺规划直接决定了零件的可制造性及成形质量,包括分层切片、路径规划、参数匹配等,而电弧增材制造成形过程及成形规律更加复杂,传统的路径规划方法难以满足复杂结构件的高质量成形要求,如何突破传统方法约束,设计更加符合电弧增材制造成形特征的路径规划方法迫在眉睫。
针对上述背景,北京工业大学智能成型装备与系统陈树君教授团队深入分析了传统轮廓偏置路径规划方法的优缺点,从底层算法出发,扬长避短,综合多种影响因素,设计了一种基于骨架轮廓分区的混合路径规划方法。近日,该团队在计算机集成制造领域权威期刊《Robotics and Computer-Integrated Manufacturing》上报道了有关机器人增材制造的骨架轮廓分区混合路径规划方法的研究工作。相关论文题为’Hybrid path planning method based on skeleton contour partitioning for robotic additive manufacturing’。
 论文链接:
论文链接:
https://doi.org/10.1016/j.rcim.2023.102633
该工作首先精确识别传统路径规划方法中的缺陷区域,经过过滤并合并重构为骨架轮廓区域;其次提出了一种基于梯形无限分割的多边形分区方法,将骨架填充区进行分区分形规划;最后将轮廓偏置路径分割重组与骨架区路径合并为电弧增材的成形路径。
![]() 研究简介
研究简介
该研究针对传统轮廓偏置方法不可避免的狭长和尖角两类缺陷区域提出一种基于布尔差运算的正反等距两次偏置精确识别缺陷区域的新方法,通过设定角度阈值,可选择性的保留一定角度范围内的缺陷区域。
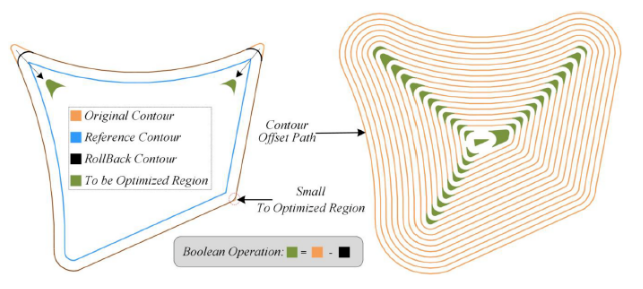 图1 多边形布尔运算识别缺陷区域
图1 多边形布尔运算识别缺陷区域
该研究同时提出一种基于梯形微分重建的多边形分区方法,可将任意切片轮廓分解为多个子多边形,并根据子多边形的几何形状重新规划往复直线路径。
 图2 缺陷区域合并为骨架填充区
图2 缺陷区域合并为骨架填充区
最后所有轮廓偏置路径被骨架填充区分割并与往复直线路径重构为新的成形路径,该方法实现了复杂结构致密填充的同时继承了传统轮廓偏置几何还原度高的优点。
 图3 复杂结构件成形路径仿真
图3 复杂结构件成形路径仿真
文章来源:焊接切割联盟
论文引用信息:
Tao Zhao, Zhaoyang Yan, Liwei Wang, Rui Pan, Xiaowei Wang, Kun Liu, Kaiwei Guo, Qingsong Hu, Shujun Chen,Hybrid path planning method based on skeleton contour partitioning for robotic additive manufacturing,Robotics and Computer-Integrated Manufacturing,Volume 85,2024,102633,ISSN 0736-5845,https://doi.org/10.1016/j.rcim.2023.102633.
l 谷专栏 l
欢迎高校及科研机构、企业科学家加入谷专栏,与业界分享对推动增材制造发展起关键作用的共性基础科研与应用成果,欢迎扫描下方图片二维码提交您的信息。
白皮书下载 l 加入3D科学谷QQ群:106477771
网站投稿 l 发送至2509957133@qq.com
欢迎转载 l 转载请注明来源3D科学谷 l 链接到3D科学谷网站原文