能够在外界刺激下变形的智能材料在软体机器人等领域拥有广阔的应用前景。其中,铁磁液晶弹性体具有多刺激响应、多模式、多功能的特性,受到了研究人员的关注。然而,目前缺乏一种可以针对其两个功能域进行独立编程的方法,大大限制了其制造能力。

中国科学技术大学工程科学学院机器人与智能装备所李木军副教授课题组,联合近代力学系王柳特任教授以及南方科技大学刘吉副教授,提出了一种铁磁液晶弹性体的双各向异性可编程3D打印方法,成功实现了液晶取向和磁化强度的独立编程,以及制件在不同外场刺激(热、光、磁)下的可控多模式变形。该论文以”3D-printed ferromagnetic liquid crystal elastomer with programmed dual anisotropy and multi-responsiveness”为题发表于国际学术期刊《Advanced Materials》。

 ▲论文链接:
▲论文链接:
https://doi.org/10.1002/adma.202302824
![]() 可编程
可编程
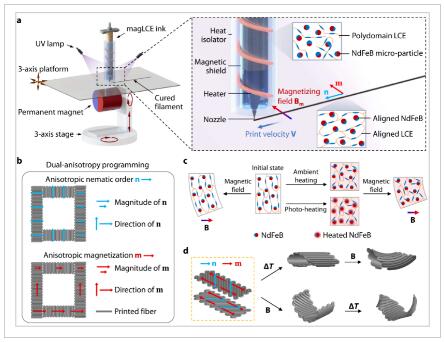 ▲铁磁液晶弹性体的可编程双各向异性3D打印及其多模式变形
▲铁磁液晶弹性体的可编程双各向异性3D打印及其多模式变形
该论文在墨水直写打印过程中通过外磁场和流动剪切实现铁磁液晶弹性体中铁磁域的磁化强度和液晶基元的取向。通过控制磁场与打印速度的方向和大小,分别实现了磁化强度和液晶取向的自由编程。结果显示,在加热变形的同时,铁磁液晶弹性体仍拥有磁变形能力,且表现出目前3D打印智能材料中最高的能量密度和响应速度。在此基础上,研究人员制造了一系列能够在不同外场顺序下进行多模式变形的铁磁液晶弹性体执行器,并通过调控液晶弹性体基质的变形温度实现了顺序变形。
基于该技术,该工作展示了一个3D打印的铁磁液晶弹性体带状机器人,可以在不同的地形、温度和磁场环境下,以不同的模式运动,表现出强大的环境适应。此外,研究人员还展示了基于铁磁液晶弹性体的多稳态力学超材料。通过磁场和近红外激光控制铁磁液晶弹性体的变形,使超材料在不同稳态之间切换,进而在压缩过程中展现出高度可调的力学性能。
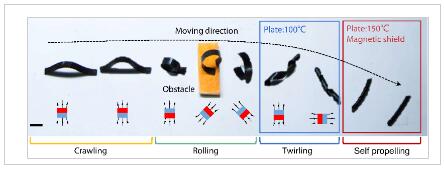 ▲具有多变形能力和环境适应性的3D打印铁磁液晶弹
▲具有多变形能力和环境适应性的3D打印铁磁液晶弹
性体带状机器人
本研究的结果表明,物理场辅助的3D打印可以大大拓宽以铁磁液晶弹性体为代表的多功能域材料的制造与编程能力,进而在不同外场刺激下实现可控的多模式响应,对软体机器人、柔性电子、超材料等领域的发展起到推动作用。
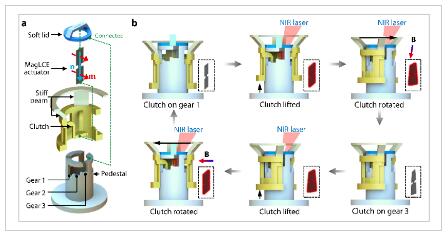 ▲基于铁磁液晶弹性体的多稳态力学超材料
▲基于铁磁液晶弹性体的多稳态力学超材料
以上工作得到了国家自然科学基金、科技部国家重点研发计划、安徽省自然科学基金支持。中国科学技术大学精密机械与精密仪器系孙宇轩博士是该论文的第一作者,中国科学技术大学李木军副教授、王柳特任教授、张世武教授,南方科技大学刘吉副教授为共同通讯作者。论文作者还包括中国科学技术大学彭晨晖特任教授。
l 谷专栏 l
欢迎高校及科研机构、企业科学家加入谷专栏,与业界分享对推动增材制造发展起关键作用的共性基础科研与应用成果,欢迎扫描下方图片二维码提交您的信息。
白皮书下载 l 加入3D科学谷QQ群:106477771
网站投稿 l 发送至2509957133@qq.com
欢迎转载 l 转载请注明来源3D科学谷