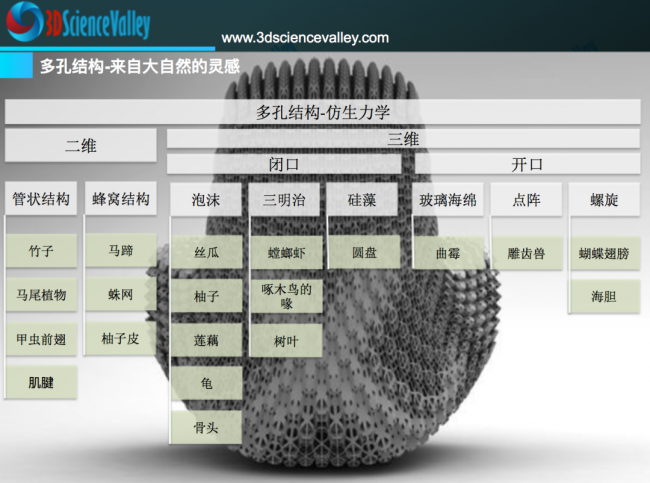
根据《小点阵、大洞天,一文洞悉3D打印为缓冲、防护产品创造新机遇的精益之道》一文,3D打印点阵晶格结构,可以认为是大量相同的点阵单元通过某种形式周期性地组合而构成的多孔结构。这种结构的性能具有很高的设计灵活性,通过调整点阵的相对密度、单胞的构型、连杆的尺寸,达到结构的强度、刚度、韧性、耐久性、静力学性能、动力力学性能的完美平衡。
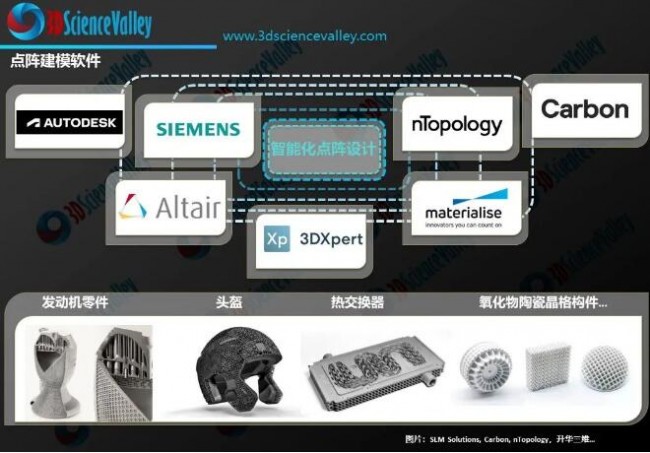
这意味着,设计师通过调整单个胞元尺寸、杆径和胞元形状,将可能实现产品更高的设计美感和力学性能。结合3D打印在制造复杂结构方面的能力,设计师能够更加能够专注于产品本身,这为3D打印晶格结构的应用打开了更大的空间。
本期,通过聚焦近期国内在点阵结构方面的实践与研究的多个闪光点,3D科学谷与谷友一起来领略的这一领域的研究近况。
© 3D科学谷白皮书
![]() 长条镜柔性支撑及点阵结构设计方法
长条镜柔性支撑及点阵结构设计方法
© 3D科学谷白皮书
刘朋朋、吴俊、常君磊、庞寿成、邹宝成、张祝伟
北京空间机电研究所先进光学遥感技术北京市重点实验室
摘要:
离轴三反光学系统多采用长条形反射镜,为尽可能提高反射镜面形精度,其支撑结构形式多为柔性支撑;为了在保证结构力学性能的基础上满足轻量化的需求,支撑亦多采用壳体点阵结构。
本课题基于尺寸优化技术,建立了长条形反射镜的参数化有限元模型以及双轴圆弧切口柔性铰链支撑的多参数优化模型,分别应用可行方向法及自适应响应面优化算法得到了质量约束下刚度最优的反射镜面板、筋板厚度参数以及刚度约束下镜面面形最优的柔铰支撑几何尺寸参数,并应用参数试验方法对该柔性支撑安装角度及安装轴向位置进行了独立变量的影响分析。
对于背板的设计,本课题提出了一种基于点云三维重建的点阵结构设计仿真优化方法,采用贪婪三角化投影算法对点阵结构包络生成的点云进行网格重构,保证了点阵结构模型的连续性与真实性。经过仿真验证,优化参数下重力、温度、强迫位移各工况下反射镜综合面形误差(0.018λ)和装调方向重力下刚体位移(0.007 mm)均达到最优。表明基于点云三维重建的点阵结构设计仿真优化方法合理可行,可推广应用于类似结构形式的反射镜支撑。
![]() 基于DLP工艺的柔弹性点阵吸能支架研究
基于DLP工艺的柔弹性点阵吸能支架研究
方创1纪小刚1,2邓霖1王炜1
江南大学机械工程学院2. 江苏省食品先进制造装备技术重点实验室
摘要:
面向微小多功能支架结构设计与原型制造需求,开展了基于数字光处理(Digital Light Processing, DLP)快速成形工艺的柔弹性点阵支架设计与制备研究。以胞元结构几何拓扑设计为主线,利用Timoshenko梁理论对胞元结构建立等效力学模型,得到预测能量吸收的数学模型,聚焦分析胞元几何尺寸和承载方向对其影响规律。配置新颖柔弹性光敏树脂为成形材料,选用DLP成形工艺,实现对应点阵结构的高精、高效制备。结合数值模拟和物理实验,着重探究了杆径、胞元边长、点阵层数对点阵结构吸能特性的影响。
结果表明,该点阵结构面外压缩较面内压缩具有显著优越的吸能特性,且胞元边长越小,杆径越大,点阵层数越多,吸能特性越佳。理论分析、数值模拟和物理实验所得规律基本一致,可为后续皮肤组织工程支架的研制提供相关理论参考。
![]() 基于功能原理的Gyroid点阵结构塑性屈服强度研究
基于功能原理的Gyroid点阵结构塑性屈服强度研究
© 3D科学谷白皮书
吴凤和1王超世1孙迎兵1刘磊2张同庆2王朝华1
燕山大学机械工程学院2. 太原科技大学机械工程学院
摘要:
点阵结构与密实结构存在的力学性能差异之一表现在塑性屈服响应上,因此,研究其屈服行为可为点阵结构的设计和应用提供重要的理论依据。
首先,对Gyroid点阵结构进行简化,并基于变形体功能原理建立其力学模型,得到Gyroid点阵结构塑性屈服强度与体积分数之间的映射关系;
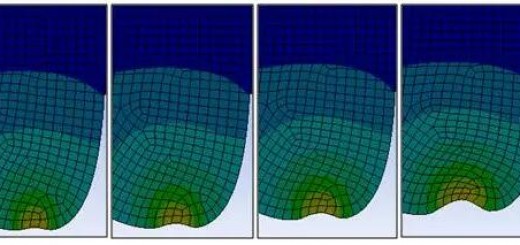
然后,基于有限元分析软件Abaqus对Gyroid点阵结构准静态压缩过程开展仿真实验,初步验证理论模型的准确性;
最后,通过选择性激光熔化(Selective Laser Melting,SLM)制备不同体积分数316L不锈钢Gyroid点阵结构,进行单轴压缩实验,分析其变形机制与力学性能。
结果表明,理论推导、有限元仿真结果与实验结果相比,误差在25%以内,且根据三种方法结果拟合得到的Gibson-Ashby模型系数具有较好的一致性,表明本文基于理论推导建立的Gyroid点阵结构塑性屈服强度预测模型的有效性。理论模型的构建方法可以转化到其他复杂类型点阵结构中,为快速核算点阵结构力学性能,并将其应用在工程装备中提供理论依据。
![]() 热处理对选区激光熔化制备的点阵结构性能影响研究
热处理对选区激光熔化制备的点阵结构性能影响研究
© 3D科学谷白皮书
聂云飞1,2唐倩1,2,3李坤1,2,3王浩宇1,4吴海斌1王彬生1秦昌亮1杨震5石佳5
重庆大学机械与运载工程学院2. 金属增材制造(3D打印)重庆市重点实验室3. 高端装备机械传动全国重点实验室4. 国家能源集团神东煤炭集团有限责任公司5. 重庆齿轮箱有限责任公司
摘要:
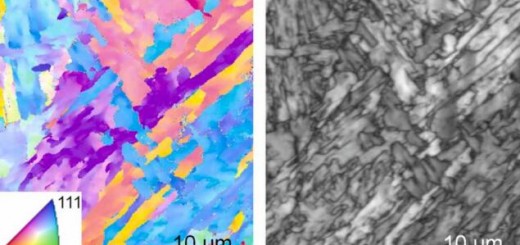
选区激光熔化(SLM)技术因其独特的成形原理成为制备复杂点阵结构的理想工艺。以钛合金骨架和片状结构为研究对象,通过数值仿真和试验相结合的方法,分析了热处理工艺对结构微观组织、力学性能、断裂机制及吸能特性的影响规律。
结果表明,固溶时效热处理后钛合金中α+β相均匀分布,固溶温度的增加会使片状α’相马氏体逐渐减少而β相增多;不同热处理状态下片状结构压缩强度为骨架结构的1.81~2.17倍,平台应力为后者的3.1倍,但两者弹性模量相当,同时热处理工艺对骨架结构力学性能影响较小而对片状结构影响较大;两类结构都表现出了45°结对角剪切断裂和断裂带传递的现象;骨架结构能量吸收效率远大于片状结构,但累积能量吸收量较低,热处理工艺没有提高被测结构的吸能性能。
![]() 3D打印制造约束下的多孔结构与路径协同优化方法
3D打印制造约束下的多孔结构与路径协同优化方法
夏令伟1谢亿民2马国伟1
河北工业大学智慧基础设施研究院2. 皇家墨尔本理工大学创新结构与材料中心
摘要:
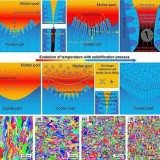
多孔结构具有优异的综合性能,得到广泛工程应用。相较于等材制造和减材制造,3D打印增材制造在多孔结构的制备上更加灵活、效率更高。然而,其复杂的拓扑形态导致打印路径的不连续和不均匀填充,降低成型质量和力学性能。
针对上述问题,提出了基于Voronoi骨架的多孔结构与路径协同优化方法。在结构优化的基础上,通过施加制造约束考虑路径优化问题,生成适合3D打印的多孔结构。结构的材料分布可根据受力状态进行调整,以周期和梯度两种形态构造Voronoi多孔单元。结合深度优先检索算法,优化结构采用Voronoi骨架偏置而成的全局连续路径填充。计算结果显示协同优化方法解决了路径的整数倍和自交问题,实现了多孔结构的均匀打印;消除了路径断点和喷头空驶产生的打印缺陷。通过挤出成型增材制造技术验证了可行性。力学实验证明由于协同优化方法实现了多孔结构的高质量打印,打印构件的力学性能明显优于传统方法。本研究为实现3D打印多孔结构的高性能化、推动材料-结构-性能一体化设计具有重要作用。
![]() 高承载梯度分层点阵结构的拓扑优化设计方法
高承载梯度分层点阵结构的拓扑优化设计方法
黄垲轩、丁喆、张严、李小白
武汉科技大学冶金装备及其控制教育部重点实验室、武汉科技大学机械传动与制造工程湖北省重点实验室
摘要:
随着增材制造技术的迅速发展,点阵结构由于其高比强度、高比刚度等优异力学性能受到广泛关注,但其单胞分布设计大多基于均布式假设,导致其承载能力相对较差.基于拓扑优化技术提出了一种梯度分层的点阵结构设计方法.
首先,基于水平集函数建立点阵单胞几何构型的显式描述模型,引入形状插值技术实现点阵单胞的梯度构型生成;
其次,构建基于Kriging的梯度点阵单胞宏观等效力学属性预测模型,建立宏观有限单元密度与微观点阵单胞等效力学属性的内在联系;
然后,以点阵结构刚度最大为优化目标,结构材料用量和力学控制方程为约束条件,构建点阵结构的梯度分层拓扑优化模型,并采用OC算法进行数值求解.
算例结果表明,所提方法可实现点阵结构的最优梯度分层设计,充分提高了点阵结构的承载性能,同时可保证不同梯度点阵单胞之间的几何连续性.最后,开展梯度分层点阵结构与传统均匀点阵结构和线性梯度点阵结构的准静态压缩仿真分析,仿真结果表明,与传统均匀点阵结构和线性梯度点阵结构相比,梯度分层点阵结构的承载能力明显提高.研究结果可为高承载点阵结构设计提供理论参考。
l 谷专栏 l
欢迎高校及科研机构、企业科学家加入谷专栏,与业界分享对推动增材制造发展起关键作用的共性基础科研与应用成果,欢迎扫描下方图片二维码提交您的信息。
白皮书下载 l 加入3D科学谷QQ群:106477771
网站投稿 l 发送至2509957133@qq.com
欢迎转载 l 转载请注明来源3D科学谷